Industrial motion controller/driver 8SMC4-ETHERNET/RS232-B19 is designed especially to control up to 12 mechatronic systems based on standard DC, Servo or Stepper technologies. Controller/driver housing can be mounted in standard 19 inch industrial cabinets. Several boxes can be connected in a single network via Ethernet port. System can be automatically set on a peer-to-peer mode without any special infrastructure or master servers to operate. Also each axis could be controlled via separate RS232 port.
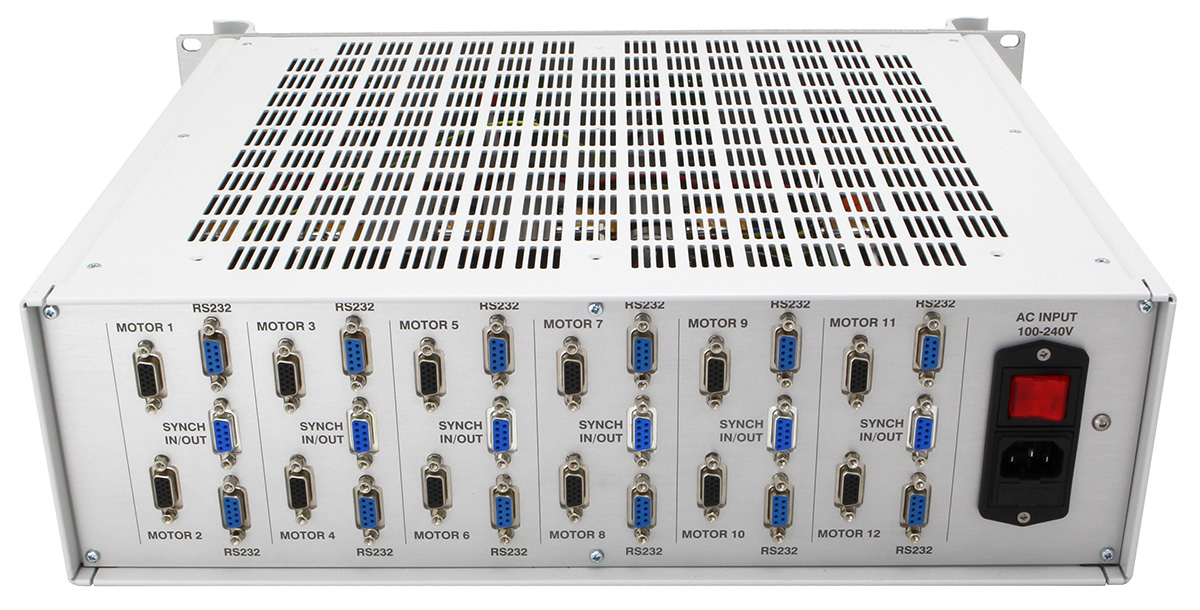
8SMC4-ETHERNET/RS232-B19 contains all necessary subsystems, including: control, power units and etc., which support the simultaneous work of all axes. Controller/driver can be connected to a number of PC-based workstations via Ethernet. All users have access to the range setting of the available axes and assignment of access privileges. From the programmer’s point of view, working with all axes of the system is very similar to working with a simple 8SMC4-USB box. The number of the axes available for a user and processed by the system can reach 50000. Front panel contains LED power and status indicators, manual buttons, system interlock button and Ethernet port. On the back panel there are motor connectors and separate RS232 ports for each axis, synchronization I/O connectors, a power connector and on/off button.The system is cooled through grille slots in upside and underside walls of the box.
Software
All software supplied with the controller is compatible with Windows 10,
Windows 8, Windows 7, Windows Vista, Windows XP, Linux, and Mac OS X (32-bit and 64-bit versions) as well with Tango and FESA. Controller/driver is delivered with a cross-platform library and examples which allow quick programming on C++, C#, .NET, Delphi, Visual Basic, gcc, Xcode, Matlab, Java, Python and LabVIEW. The software package also includes XILab user interface, which allows easy access to all motion functions and settings. A scripting language (an EcmaScript dialect) is integrated into XILab, which allows easy sequencing of actions including cycles and conditional breakpoints without compilation and mastering a programming language.
Specifications
Number of axes
8, 10, 12
Motor parameters
Motor type
stepper/dc/servo
Current
Stepper motor
0,1- 3 A
DC, servo
0,1- 6 A
Voltage
2-36
Motor kinematics
Step division (for stepper motor)
1-1/256
Maximum speed
Stepper motor
35000 steps/s
DC, servo
800000 counts/s
Motion control
Motion modes
move left/right, move to point, shift on delta, continuous speed, acceleration and deceleration ramps, backlash compensation mode, automatic home position calibration mode and etc.. Optionally: linear interpolation, circular interpolation.